ESP8266 NodeMCU распиновка (pinout)
Распиновка (pinout) NodeMCU V2 (Amica, DOIT) полностью совпадает с распиновкой ESP8266 NodeMCU V3 (LoLin). Исключение составляют зарезервированные выводы RSV (на рисунке вверху слева). У NodeMCU V3 на них заведена «земля» и напряжение 5V с USB-разъема.

Описание и назначение выводов NodeMCU V2 ESP8266
GND — общий, «земля»
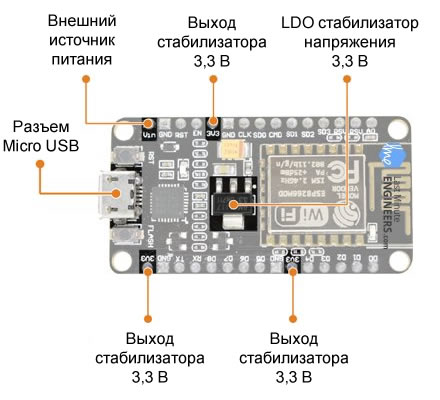
Выводы питания
Vin — вывод для подключения внешнего источника питания 5V. Стабилизатор AMS1117-3.3 позволяет подавать питание на Vin в широком диапазоне от 5 до 10 V. Хотя стабилизатор допускает подачу более высокого напряжения (до 15 V), но без дополнительного охлаждения может возникать перегрев чипа.
3.3V — контакт выходного напряжения внутрисхемного стабилизатора. Может быть использован для питания подключаемых к плате датчиков. Суммарная максимальная нагрузка всех выводов 3.3V не должна превышать 300мА.
Выводы GPIO
GPIO (General Purpose Interput Output) — контакты общего назначения для ввода/вывода данных. Могут быть сконфигурированы как входы или выходы и программно назначены на различные функции. Распиновка представлена на рисунке.
Выводы управления
RST (Reset) — вывод используется для сброса микроконтроллера ESP8266.
EN (Chip Enable) — при подаче на вывод сигнала высокого уровня, микроконтроллер ESP8266 переходит в рабочий режим, при сигнале низкого уровня — в режим низкого энергопотребления (режим энергосбережения).
WAKE — вывод используется для пробуждения чипа ESP8266 из режима глубокого сна (deep-sleep mode).
АЦП (ADC)
ADC0 / TOUT — вывод встроенного 10-разрядного аналого-цифрового преобразователя (АЦП). Преобразованные значения лежат в интервале 0-1023.
Плата разработки NodeMCU V2 имеет внутренний делитель напряжения, входной диапазон АЦП составляет 0 — 3,3 В.
UART
UART — асинхронный последовательный интерфейс устанавливает связь с другими устройствами по шине UART.
SPI
SPI (Serial Peripheral Interface) — последовательный периферийный интерфейс. NodeMCU имеет два SPI (SPI и HSPI) в ведущем и подчиненном режимах.
SDIO
SDIO — интерфейс безопасных цифровых входов/выходов, предназначен для коммутации с внешней флэш-памятью стандарта SD по последовательной шине.
Reserved
FLASH
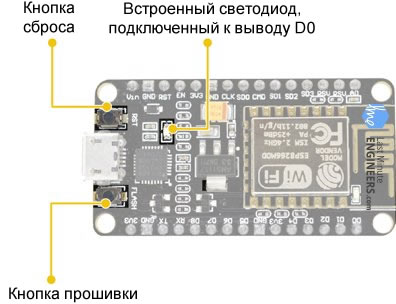
Кнопка Flash на NodeMCU подключает к земле GPIO0. Ее можно использовать как обычную кнопку. Если программно подтянуть вывод GPIO0 с помощью внутреннего подтягивающего резистора к высокому уровню, то появление низкого уровня на этом выводе будет означать, что кнопка нажата.
Интерфейс I2C — последовательная асимметричная шина. I2C используется для подключения датчиков и периферийных устройств. NodeMCU ESP8266 не имеет аппаратных выводов I2C, но интерфейс можно реализовать программно. Поддерживаются как I2C Master, так и I2C Slave. Обычно в качестве контактов I2C используются следующие выводы.
PWM (pulse-width modulation) — широтно-импульсная модуляция (ШИМ) управляет мощностью методом пульсирующего включения и выключения вывода. NodeMCU поддерживает программный ШИМ на выводах, обозначенных на рисунке изгибающейся линией.

Onboard LEDs
Плата имеет два встроенных светодиода. Один находится на плате NodeMCU и подключен к GPIO16, а другой на плате модуля ESP-12 и подключен к GPIO2.
CLK (GPIO6), SDO (GPIO7), CMD (GPIO11), SD1 (GPIO8), SD2 (GPIO9) и SD1 (GPIO10) — вывода подключены к Flash чипу в модуле ESP-12E, не рекомендуется использовать.
Выводы GPIO6-GPIO11 (SDIO) привязаны к встроенной памяти и не рекомендуются к использованию в других целях, кроме подключения внешней памяти. Все цифровые контакты ввода/вывода, за исключением GPIO16, поддерживают обработку прерываний.
TX (GPIO1), RX (GPIO3) — контакты для загрузки прошивки и связи с компьютером, не рекомендуется использовать.
Материалы по теме:
Размещение этой статьи на других сайтах как полностью, так и частично разрешено только после согласования с администрацией myROBOT.RU
Обзор платы NodeMCU ESP8266 и ее использование в Arduino IDE
Интернет вещей (IoT) является одной из самых популярных областей в мире технологий. Физические объекты и цифровой мир связаны сейчас как никогда. Помня об этом, компания Espressif Systems (шанхайская компания по производству полупроводниковых устройств) выпустила крутой микроконтроллер с поддержкой Wi-Fi, ESP8266, по невероятной цене! С помощью него менее чем за 3 доллара можно контролировать и управлять устройством из любой точки мира – идеально подходит практически для любого проекта IoT.
Модуль ESP-12E
Отладочная плата оснащена модулем ESP-12E, содержащим микросхему ESP8266 с RISC микропроцессором Tensilica Xtensa® 32-bit LX106, который работает с регулируемой тактовой частотой от 80 до 160 МГц и поддерживает RTOS.
Характеристики ESP-12E

- 32-разрядный LX106 от Tensilica Xtensa®
- Тактовая частота от 80 до 160 МГц
- 128 КБ встроенной оперативной памяти
- 4 МБ внешней внешней флеш-памяти
- Приемопередатчик Wi-Fi 802.11b/g/n
Также данный модуль имеет 128 КБ ОЗУ и 4 МБ флеш-памяти (для хранения программ и данных), достаточных, чтобы справиться с большими строками, которые составляют веб-страницы, данными в JSON/XML и всем, что мы сегодня добавляем на устройства IoT.
ESP8266 содержит встроенный приемопередатчик Wi-Fi 802.11b/g/n HT40, поэтому он может не только подключаться к сети Wi-Fi и взаимодействовать с интернетом, но и устанавливать собственную сеть, позволяя другим устройствам подключаться напрямую к нему. Это делает ESP8266 NodeMCU еще более универсальным.
Требования к питанию
Поскольку диапазон рабочего напряжения ESP8266 составляет от 3 В до 3,6 В, данная плата для поддержания постоянного напряжения на уровне 3,3 В поставляется с LDO стабилизатором напряжения. Он может надежно обеспечивать ток до 600 мА, чего должно быть более чем достаточно, поскольку ESP8266 во время радиочастотных передач потребляет до 80 мА. Выход стабилизатора также выводится на выводы на сторонах платы и обозначен как 3V3. Эти выводы можно использовать для подачи питания на внешние компоненты.
Требования к питанию
- Рабочее напряжение: от 2,5 до 3,6 В
- Встроенный стабилизатор: 3,3 В, 600 мА
- Рабочий ток: 80 мА
- Потребление в спящем режиме: 20 мкА
Питание к ESP8266 NodeMCU подается через встроенный USB-разъем MicroB. В качестве альтернативы, если у вас есть стабилизированный источник напряжения 5 В, можно использовать вывод VIN для непосредственного питания ESP8266 и его периферии.
Предупреждение
ESP8266 требует 3,3 В для питания и логические уровни 3,3 В для связи. Контакты GPIO не допускают напряжение 5 В! Если вы хотите соединить плату со схемами 5 В (или выше), то необходимо реализовать согласование логических уровней.
Периферия и ввод/вывод
ESP8266 NodeMCU имеет в общей сложности 17 выводов GPIO, выведенных на разъемы с обеих сторон отладочной платы. Эти выводы могут использоваться для выполнения различных периферийных задач, в том числе:
- вход АЦП – канал 10-разрядного АЦП;
- интерфейс UART – интерфейс UART используется для загрузки кода по последовательной связи;
- выходы ШИМ – выводы ШИМ могут использоваться для регулировки яркости светодиодов или управления двигателями;
- интерфейсы SPI, I2C – интерфейсы используются SPI и I2C для подключения всевозможных датчиков и периферийных устройств;
- интерфейс I2S – интерфейс I2S используется для цифровой передачи звука.
Мультиплексируемые выводы ввода/вывода

- 1 канал АЦП
- 2 интерфейса UART
- 4 выхода ШИМ
- Интерфейсы SPI, I2C и I2S
В ESP8266 используется функция мультиплексирования выводов (несколько периферийных устройств мультиплексируются на один вывод GPIO). Это означает, что один вывод GPIO может действовать как PWM/UART/SPI.
Кнопки и светодиодный индикатор на плате
На плате ESP8266 NodeMCU находятся две кнопки. Одна из них, помеченная как RST, расположенная в верхнем левом углу, представляет собой кнопку сброса, которая, конечно же, используется для сброса микросхемы ESP8266. Другая кнопка, FLASH, в левом нижнем углу – это кнопка загрузки, используемая при обновлении прошивки.
Кнопки и индикаторы
- RST – сброс чипа ESP8266
- FLASH – загрузка новой программы
- Синий светодиод — программируется пользователем
На плате также имеется светодиодный индикатор, который программируется пользователем и подключен к выводу D0 платы.
Последовательная связь
На плате установлен контроллер USB-UART CP2102 от Silicon Labs, который преобразует USB сигнал в сигнал последовательного порта и позволяет компьютеру программировать и взаимодействовать с микросхемой ESP8266.
Последовательная связь

- USB-UART преобразователь CP2102
- Скорость связи 4,5 Мбит/с
- Поддержка управления потоком
Если на вашем компьютере установлена старая версия драйвера CP2102, рекомендуем выполнить обновление прямо сейчас.
Распиновка ESP8266 NodeMCU
С внешним миром ESP8266 NodeMCU соединяют всего 30 выводов. Ниже показана распиновка отладочной платы.
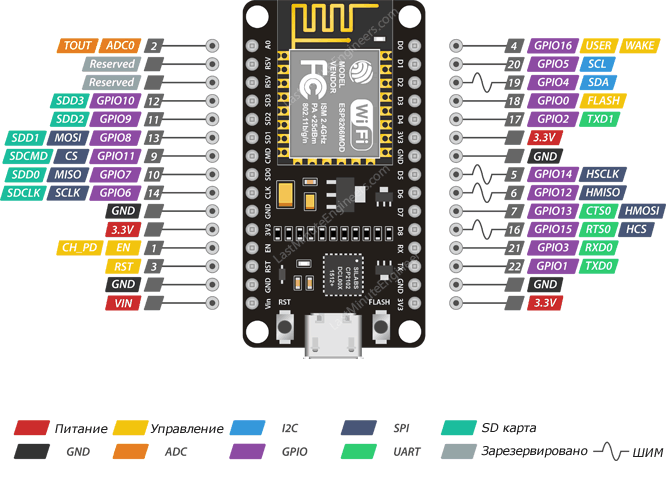
Для простоты мы сгруппируем выводы с аналогичными функциями.
Выводы питания – на плате расположено четыре вывода питания, а именно: один вывод VIN и три вывода 3.3V. Если у вас есть стабилизированный источник напряжения 5 В, вывод VIN можно использовать для непосредственного питания ESP8266 и его периферии. Выводы 3.3V – это выходы встроенного стабилизатора напряжения. Эти выводы могут использоваться для подачи питания на внешние компоненты.
GND – это вывод земли отладочной платы ESP8266 NodeMCU.
Выводы I2C используются для подключения всех видов датчиков и периферийных устройств на шине I2C в вашем проекте. Поддерживаются и I2C Master, и I2C Slave. Работа интерфейса I2C может быть реализована программно, а тактовая частота составляет максимум 100 кГц. Следует отметить, что тактовая частота I2C должна быть выше самой низкой тактовой частоты из ведомых устройств.
Выводы GPIO На ESP8266 NodeMCU имеется 17 выводов GPIO, которые можно назначать программно на различные функции, такие как I2C, I2S, UART, PWM, дистанционное инфракрасное управление, светодиодный индикатор и кнопка. Каждый включенный вывод GPIO может быть настроен либо на внутреннюю подтяжку к земле или к шине питания, либо установлен на высокоимпедансное состояние. При конфигурировании на вход для генерирования прерываний процессора он может быть настроен на срабатывание либо по фронту, либо по спаду.
Вывод ADC подает сигнал на имеющийся в NodeMCU, встроенный 10-разрядный прецизионный аналого-цифровой преобразователь последовательного приближения (SAR ADC). С помощью этого АЦП могут быть реализованы две функции: проверка напряжения питания на выводе VDD3P3 и проверка входного напряжения на выводе TOUT (но не одновременно).
Выводы UART ESP8266 NodeMCU имеет 2 интерфейса UART, то есть UART0 и UART1, которые обеспечивают асинхронную связь (RS232 и RS485) и могут обмениваться данными со скоростью до 4,5 Мбит/с. Для связи можно использовать UART0 (выводы TXD0 , RXD0 , RST0 и CTS0 ), который поддерживает управление потоком. UART1 (вывод TXD1 ) поддерживает только сигнал передачи данных, поэтому он обычно используется для печати журнала событий.
Выводы SPI ESP8266 имеет два интерфейса SPI (SPI и HSPI), поддерживающих и ведомый (slave), и ведущий (master) режимы. Эти интерфейсы SPI также поддерживают следующие функции SPI:
- 4 режима синхронизации передачи SPI;
- до 80 МГц и тактовые частоты, полученные делением 80 МГц;
- до 64 байт FIFO.
Выводы SDIO ESP8266 имеет защищенный цифровой интерфейс ввода/вывода (SDIO, Secure Digital Input/Output Interface), который используется для прямого подключения карт SD. Поддерживаются 4-битный 25 МГц SDIO v1.1 и 4-битный 50 МГц SDIO v2.0.
Выводы PWM На плате имеется 4 канала широтно-импульсной модуляции (PWM). Выход ШИМ может быть реализован программно и использован для управления двигателями и светодиодами. Частотный диапазон ШИМ регулируется от 1000 мкс до 10000 мкс, то есть от 100 Гц до 1 кГц.
Выводы управления используются, как ни странно, для управления ESP8266. Эти выводы включают в себя вывод включения микросхемы EN , вывод сброса RST и вывод пробуждения WAKE .
- Вывод EN – микросхема ESP8266 включена, когда на вывод EN подается высокий логический уровень. При низком логическом уровне микросхема работает на минимальной мощности.
- Вывод RST используется для сброса микросхемы ESP8266.
- Вывод WAKE используется для вывода чипа из глубокого сна.
Платформы разработки для ESP8266
Теперь перейдем к интересным вещам!
Существует множество платформ разработки, которые могут быть оснащены для программирования ESP8266. Вы можете использовать Espruino – JavaScript SDK и прошивка, эмулирующая Node.js, или использовать Mongoose OS – операционную систему для устройств IoT (рекомендуемая платформа от Espressif Systems и Google Cloud IoT), или использовать комплект разработки программного обеспечения (SDK), предоставляемый Espressif. или любую из платформ, перечисленных на Википедии.
К счастью, крутое сообщество ESP8266 сделало выбор IDE на шаг вперед, создав дополнение к Arduino IDE. Если вы только начинаете программировать для ESP8266, мы рекомендуем начать с этой среды разработки, и ее мы опишем в данном руководстве.
Это дополнение ESP8266 для Arduino IDE основано на работе Ивана Грохоткова и остальной части сообщества ESP8266. Для получения дополнительной информации смотрите репозиторий GitHub ESP8266 Arduino.
Установка ядра ESP8266 на ОС Windows
Давайте приступим к установке ядра ESP8266 Arduino.
Во-первых, на вашем компьютере должна быть установлена последняя версия Arduino IDE (Arduino 1.6.4 или выше). Если у вас ее нет, рекомендуем сейчас обновиться.
Для начала нам нужно обновить менеджер плат с помощью пользовательского URL. Откройте Arduino IDE и выберите Файл → Настройки. Затем скопируйте приведенный ниже URL в текстовое поле Дополнительные ссылки для менеджера плат, расположенное в нижней части окна:
http://arduino.esp8266.com/stable/package_esp8266com_index.json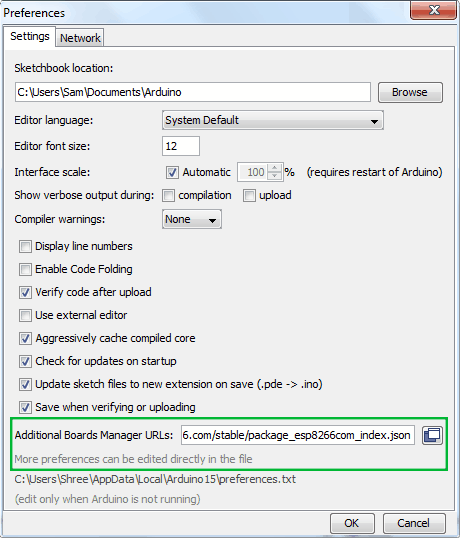
Отлично. Затем перейдите к Менеджеру плат, выбрав Инструменты → Платы → Менеджер плат. Там, в дополнение к стандартным платам Arduino, должна быть пара новых записей. Отфильтруйте результаты поиска, введя esp8266. Нажмите на эту запись и выберите Установить.
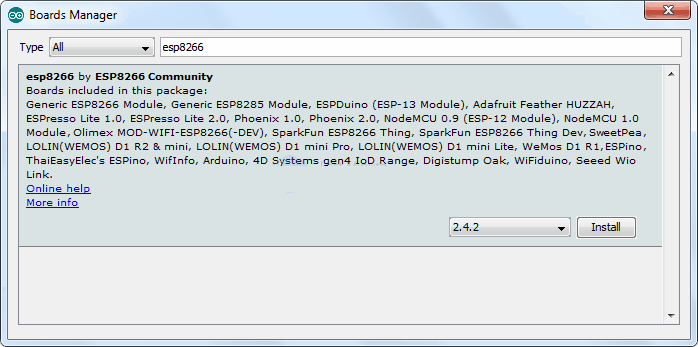
Определения и инструменты для платы ESP8266 включают в себя полностью новый набор gcc, g++ и других достаточно больших скомпилированных двоичных файлов, поэтому загрузка и установка могут занять несколько минут (заархивированный файл весит ~110 МБ). После завершения установки рядом с записью появится надпись INSTALLED. Теперь можно закрыть менеджер плат.
Пример Arduino: мигалка
Чтобы убедиться, что ядро ESP8266 Arduino и NodeMCU правильно настроены, мы загрузим самый простой скетч – The Blink!
Для этого теста мы будем использовать встроенный светодиод. Как упоминалось ранее в этом руководстве, вывод платы D0 подключен к встроенному синему светодиоду и программируется пользователем. Отлично!
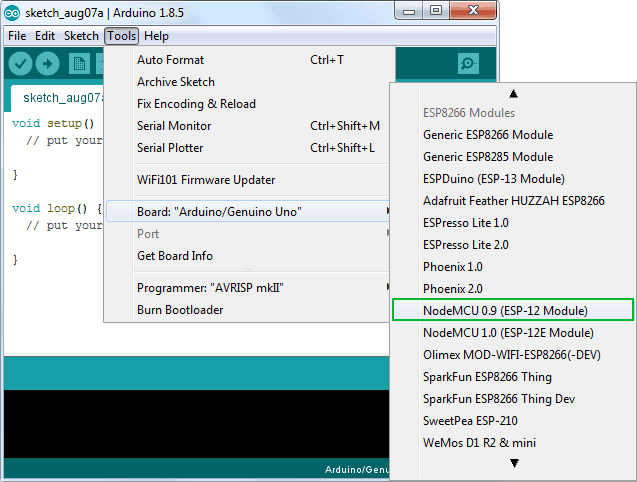
Прежде чем мы перейдем к загрузке скетча и игре со светодиодом, мы должны убедиться, что в Arduino IDE выбрана правильная плата. Откройте Arduino IDE и выберите пункт NodeMCU 0.9 (ESP-12 Module) в меню Инструменты → Плата.
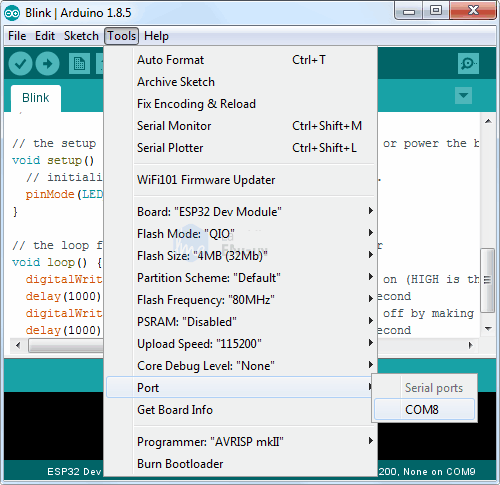
Теперь подключите ESP8266 NodeMCU к компьютеру через USB-кабель micro-B. Как только плата будет подключена, ей должен быть назначен уникальный COM-порт. На компьютерах с Windows это будет что-то вроде COM#, а на компьютерах Mac/Linux он будет в виде /dev/tty.usbserial-XXXXXX. Выберите этот последовательный порт в меню Инструменты → Порт. Также выберите скорость загрузки: 115200
Предупреждение
Уделите больше внимания выбору платы, выбору COM порта и скорости загрузки. В случае некорректных настроек при загрузке новых скетчей вы можете получить ошибку espcomm_upload_mem.
После выполнения всех настроек попробуйте пример скетча, приведенного ниже.
void setup() < pinMode(D0, OUTPUT); >void loop()
После загрузки кода светодиод начнет мигать. Возможно, чтобы ваш ESP8266 начал работать со скетчем, вам придется нажать кнопку RST.
Теги
Сохранить или поделиться
На сайте работает сервис комментирования DISQUS, который позволяет вам оставлять комментарии на множестве сайтов, имея лишь один аккаунт на Disqus.com.
В случае комментирования в качестве гостя (без регистрации на disqus.com) для публикации комментария требуется время на премодерацию.
ESP8266. Начало работы, особенности

В этом уроке поговорим о микроконтроллере ESP8266 и платах на его основе. Как с ними работать и чем они отличаются от Arduino на базе МК AVR. ESP8266 – китайский микроконтроллер за 2 доллара с большим объемом памяти и WiFi связью на борту. Официальная документация:
- https://github.com/esp8266/Arduino/blob/master/doc/reference.rst
- https://arduino-esp8266.readthedocs.io/en/latest/
Купить на Aliexpress
Дёшево купить Wemos Mini можно тут: ссылка, ссылка, ссылка. Рекомендуется брать версию как слева на картинке выше, на базе полного чипа ESP-12.
Уроки по работе с esp8266
Конкретные уроки по работе с платой и WiFi библиотеками публикуются на сайте набора GyverKIT, так как уроки на этом сайте являются общими по программированию Arduino, без углубления в сторонние библиотеки.
Характеристики
- Напряжение питания: 3.3V (2.5-3.6V)
- Ток потребления: 300 мА при запуске и передаче данных, 35 мА во время работы, 80 мА в режиме точки доступа
- Максимальный ток пина – 12 мА.
- Flash память (память программы): 1 МБ
- Flash память (файловое хранилище): 1-16 МБ в зависимости от модификации
- EEPROM память: до 4 кБ
- SRAM память: 82 кБ
- Частота ядра: 80/160 МГц
- GPIO: 11 пинов
- ШИМ: 10 пинов
- Прерывания: 10 пинов
- АЦП: 1 пин
- I2C: 1 штука (программный, пины можно назначить любые)
- I2S: 1 штука
- SPI: 1 штука
- UART: 1.5 штуки
- WiFi связь
Начало работы
Для работы с платами на основе esp8266 нужно установить ядро и драйвер.
- Идём в Файл/Настройки/Дополнительные ссылки для менеджера плат. Вставляем ссылку https://arduino.esp8266.com/stable/package_esp8266com_index.json.
- Инструменты/Плата/Менеджер плат…, ищем в поиске esp8266 и устанавливаем. В списке плат появится семейство плат на базе esp8266.
- На большинстве плат стоит USB конвертер CH340, как на всех китайских Ардуинах. Если вы ещё не устанавливали драйвер – читать здесь.
Настройки платы
Для работы с любой платой (даже самодельной) можно выбрать пункт Generic esp8266, будет доступен полный набор настроек. Для работы с Wemos Mini выбираем LOLIN Wemos D1 R2 mini. Настроек станет меньше, а к пинам платы можно будет обращаться в программе по их подписям на плате (Dn). Основные настройки:
- Upload speed: скорость загрузки прошивки. Можно смело поднимать до 921600.
- CPU Frequency: частота тактирования процессора. Для большинства задач хватит стандартных 80 МГц. На 160 МГц будет работать шустрее, но могут быть сбои.
- Flash Size: распределение памяти, настройка имеет вид xMB (FS:xMB OTA:~xKB). Размер памяти под программу не меняется – это всегда 1 МБ.
- Первое число: полный объём микросхемы памяти (в основном 4MB, на Wemos и NodeMCU стоят такие).
- Второе число: объём под файловое хранилище.
- Третье число: объём под OTA (обновление по воздуху) – всегда меньше 1 МБ.
- Что выбрать? У Wemos самый ходовой – первый вариант: 4MB (FS:2MB OTA:~1019KB).
- DOUT: медленный, но совместим со всеми модификациями esp8266.
- QIO: более быстрый, но будет работать не на всех чипах.
- Only Sketch: стереть только программу.
- Sketch + WiFi Settings: стереть программу и настройки WiFi (логин-пароль последнего подключения и т.д.).
- All Flash Contents: полностью очистить память.
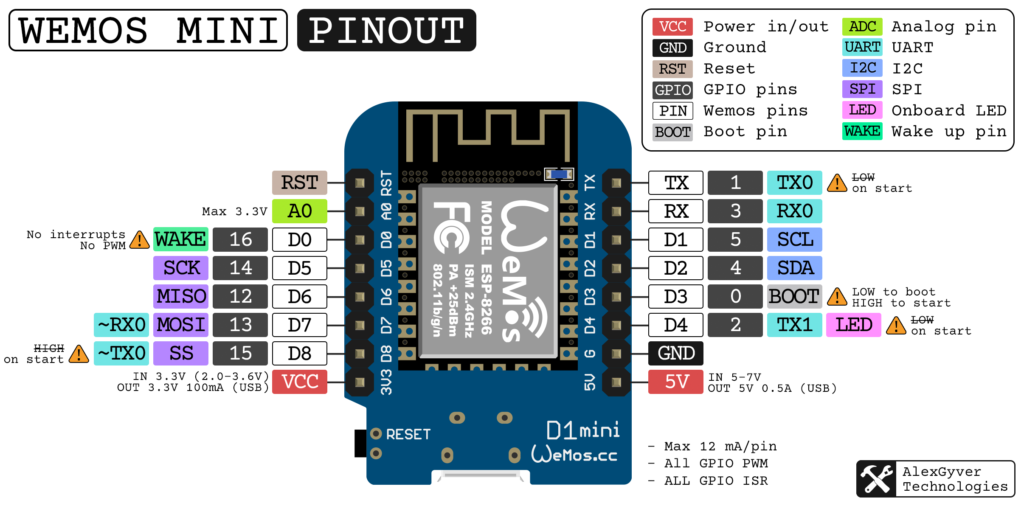
Нумерация пинов
У самого чипа esp8266 все выводы пронумерованы цифрами. На распиновке они подписаны как GPIOn, где n – номер. На плате (NodeMCU, Wemos Mini) пины подписаны как Dn и эти номера не совпадают с номерами GPIO! При работе например с Wemos можно использовать как нумерацию выводов GPIO ( digitalWrite(5, LOW) ), так и D-нумерацию пинов на плате ( digitalWrite(D1, LOW) ) – если выбрана плата Wemos. Новички очень часто в этом путаются, будьте внимательны. Также GPIO1 и GPIO3 подписаны на плате как TX и RX, по этим названиям к ним тоже можно обращаться ( digitalWrite(TX, LOW) ).
Особенности пинов
У esp8266 много системных пинов, с которыми нужно быть очень внимательным.
- К целому ряду пинов подключена внешняя Flash память, в общем случае их использовать нельзя (если очень нужно – ищите информацию). На плате NodeMCU визуально гораздо больше пинов, чем на Wemos Mini, но по факту “безопасных” для использования пинов там ровно столько же.
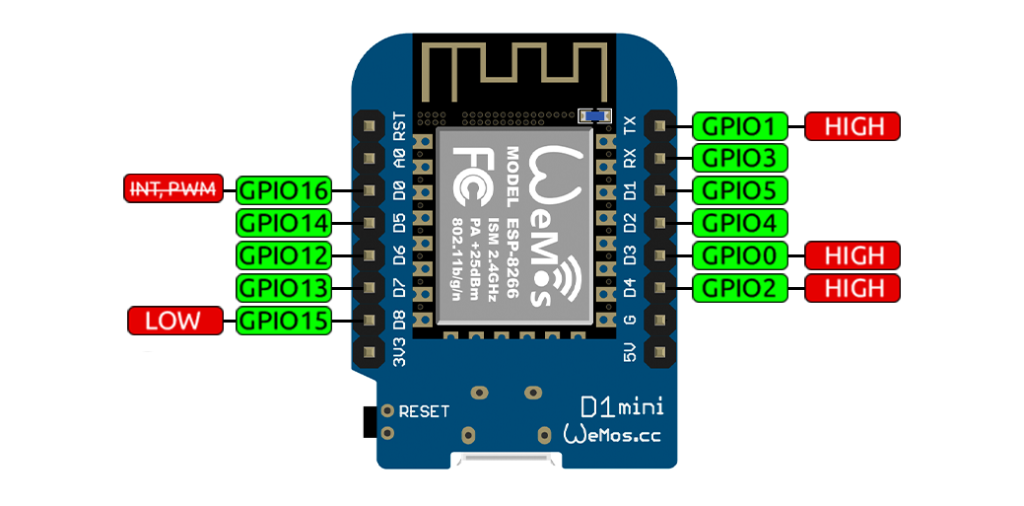
- С оставшимися пинами тоже не всё гладко: некоторые из них требуют наличия определенного логического уровня на момент включения микроконтроллера (подача питания, перезагрузка). Если к этим пинам подключить что-то, дающее противоположный сигнал – esp не запустится. Вот распиновка с нужным уровнем сигнала при запуске:
- На плате (NodeMCU, Wemos и других) эти пины уже подтянуты резисторами к нужному напряжению, поэтому нужно несколько раз подумать, что вы к ним подключаете и как оно повлияет на напряжение на пине. Например, можно подключить энкодер, он прижмёт системный пин к GND и esp не запустится.
- На GPIO16/D0 нельзя подключать прерывания ( attachInterrupt() ) и включать ШИМ сигнал ( analogWrite() ).
- Максимальный ток с GPIO – 12 мА.
- Светодиод LED_BUILTIN находится на пине GPIO2 и его поведение инвертировано: при подаче LOW он включается и наоборот.
- При старте контроллера почти все пины делают скачок до высокого уровня, подробнее – в этой статье. Единственными “спокойными” пинами являются D1 (GPIO5) и D2 (GPIO4). Если контроллер управляет напрямую какими-то железками (реле, транзистор, или является “кнопкой” для другого устройства), то лучше использовать именно эти пины!
- На этих же пинах сидит I2C, но шину можно переназначить на любые другие пины через Wire.begin(sda, scl) .
Особенности работы WiFi
WiFi реализован синхронно, его обработчик должен постоянно вызываться во время работы программы не реже, чем каждые 20 мс (если WiFi используется в программе). Обработка WiFi происходит в следующих местах:
- Автоматически в конце каждой итерации loop()
- Внутри любого delay()
- Внутри функции yield()
Если у вас есть участки программы, которые долго выполняются, то нужно разместить вызовы yield() до и после тяжёлых блоков кода. Также в чужих скетчах можно встретить delay(0) , по сути это и есть yield() .
По тем же причинам не рекомендуется использовать задержку delayMicroseconds() более чем на 20’000 мкс.
Отличия от AVR Arduino
Деление на 0
В отличие от AVR, деление на 0 приводит к критической ошибке и перезагрузке микроконтроллера. Стараемся этого избегать.
min() и max()
В ядре esp8266 функции min() и max() реализованы как функции, а не как макросы, поэтому должны использоваться с данными одного типа. Использование переменных разного типа приведёт к ошибке компиляции.
map()
В функции map(val, min, max, to min, to max) нет защиты от деления на 0, поэтому если min равен max – микроконтроллер зависнет и перезагрузится. Если min и max задаются какими-то внешними условиями – проверяйте их равенство вручную и исключайте вызов map() с такими аргументами.
Типы данных
- Тип int является синонимом long ( int32_t ) и занимает 4 байта. В AVR int это int16_t , то есть 2 байта.
- Тип char является синонимом byte – принимает значения 0.. 255 в отличие от -128.. 127 в AVR.
- Тип double имеет полную двойную точность – 8 байт. В AVR это 4 байта.
- Указатель занимает 4 байта, так как область памяти тут 32-битная. В AVR – 2 байта.
Функция analogRead()
ESP8266 имеет крайне убогий одноканальный АЦП.
- Сам АЦП в esp8266 может измерять напряжение в диапазоне 0.. 1.0V. На платах (NodeMCU, Wemos Mini) стоит делитель напряжения, который расширяет диапазон до более удобных 3.3V.
- Разрешение – 10 бит, т. е. значения 0.. 1023 как на Arduino
- Частый вызов analogRead() замедляет работу WiFi. При вызовах чаще нескольких миллисекунд WiFi полностью перестаёт работать.
- Результат analogRead() имеет кеширование до 5 мс, то есть полученные данные могут запаздывать на это время.
- АЦП может использоваться для измерения напряжения питания МК: для этого нужно вызвать ADC_MODE(ADC_VCC); до void setup() , а само напряжение питания можно получить из ESP.getVcc() .
Функция analogWrite()
- Работает на всех пинах, кроме GPIO16.
- Разрядность ШИМ по умолчанию 8 бит (0.. 255) на версиях ядра 3.x. На ранних версиях – 10 бит (0.. 1023). Скажем спасибо индусам за совместимость.
- Разрядность можно настроить в analogWriteResolution(4. 16 бит) .
- Частоту можно настроить в analogWriteFreq(100.. 40000 Гц) .
Аппаратные прерывания
- Настраиваются точно так же, через attachInterrupt() .
- Работают на всех пинах, кроме GPIO16.
- Функция-обработчик должна быть объявлена с атрибутом IRAM_ATTR :
void setup() < attachInterrupt(1, myIsr, RISING); >IRAM_ATTR void myIsr()
Либо с ICACHE_RAM_ATTR (на старых версиях ядра), вот так:
void ICACHE_RAM_ATTR myIsr() < >void setup()Функция yield()
В реализации esp8266 функция yield() выполняет другую задачу и использовать её как на AVR не получится. Скажем спасибо индусам за совместимость
EEPROM
EEPROM в esp8266 является эмуляцией из Flash памяти, поэтому мы можем выбрать нужный размер.
- Перед началом работы нужно вызвать EEPROM.begin(4.. 4096) с указанием размера области памяти в байтах.
- Для применения изменений в памяти нужно вызвать EEPROM.commit() .
- В некоторых версиях SDK отсутствует EEPROM.update() и EEPROM.length() .
- У Flash памяти небольшой ресурс – всего около 10’000 перезаписей. У фирменной памяти Winbond (можно найти на некоторых моделях ESP-12 и прочих) – около 50’000 перезаписей.
В остальном работа с библиотекой EEPROM.h ничем не отличается.
Важно: EEPROM реализован следующим образом: после запуска EEPROM.begin(4.. 4096) содержимое EEPROM указанного размера дублируется в оперативной памяти. После любого изменения и вызова EEPROM.commit() стирается весь блок Flash памяти (4 кБ) и записывается заново. Таким образом ресурс “EEPROM” памяти у ESP вырабатывается довольно быстро и весь сразу, а не по ячейкам.
Serial (UART)
- В отличие от реализации для AVR, можно изменить размер буфера на приём: Serial.setRxBufferSize(размер) в байтах. Вызывать перед Serial.begin() , по умолчанию 256 байт.
- Можно настроить работу только на приём или только на отправку для освобождения пина: Serial.begin(скорость, SERIAL_8N1, режим) , где режим:
- SERIAL_TX_ONLY – только отправка
- SERIAL_RX_ONLY – только приём
- SERIAL_FULL – приём и отправка (по умолчанию)
Полезные страницы
- Набор GyverKIT – большой стартовый набор Arduino моей разработки, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макросы, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
- Поддержать автора за работу над уроками
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])
Модуль Wi-Fi ESP8266 (ESP-01): подключение, прошивка и распиновка
Модуль ESP-01 с чипом ESP8266 предназначен для связи устройства с беспроводными сетями по WiFi.
Видеообзор
Общие сведения
ESP-01 — плата-модуль WiFi на базе популярного чипсета ESP8266EX . На борту платы находится микросхема Flash-памяти объёмом 2 МБ, чип ESP8266EX, кварцевый резонатор, два индикаторных светодиода и миниатюрная антенна из дорожки на верхнем слое печатной платы в виде змейки. Flash-память необходима для хранения программного обеспечения. При каждом включении питания, ПО автоматически загружается в чип ESP8266EX.
По умолчанию модуль настроен на работу через «AT-команды». Управляющая плата посылает команды — Wi-Fi модуль выполняет соответствующую операцию.
Но внутри чипа ESP8266 прячется целый микроконтроллер, который является самодостаточным устройством. Прошивать модуль можно на разных языках программирования. Но обо всё по порядку.
Работа с AT командами
Подключение и настройка
В стандартной прошивке Wi-Fi модуль общается с управляющей платой через «AT-команды» по протоколу UART.
На всех платах Iskra и Arduino присутствует хотя бы один аппаратный UART — HardwareSerial. Если же по каким то причинам он занят другим устройством, можно воспользоваться программным UART — SoftwareSerial.
HardwareSerial
На управляющей плате Iskra JS и платах Arduino с микроконтроллером ATmega32U4 / ATSAMD21G18 данные по USB и общение через пины 0 и 1 осуществляется через два раздельных UART . Это даёт возможность подключить Wi-Fi модуль к аппаратному UART на пинах 0 и 1 .
Список поддерживаемых плат:
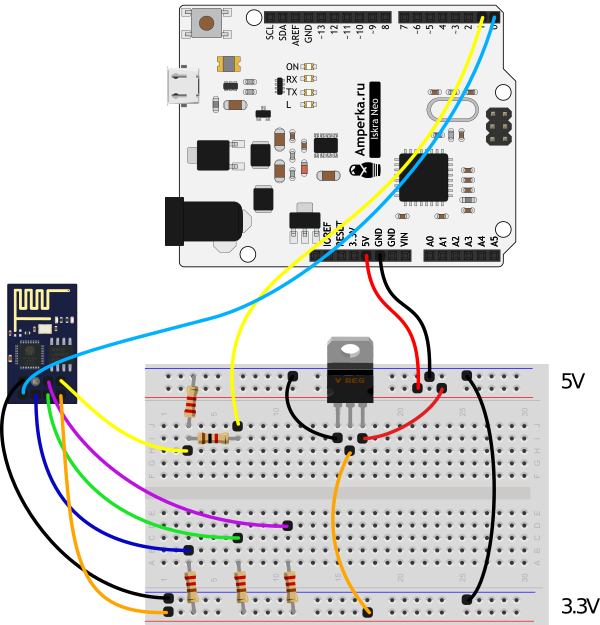
Для примера подключим модуль Wi-Fi к платформе Iskra Neo.
Прошейте управляющую платформу кодом ниже.
Код прошивки
// serial-порт к которому подключён Wi-Fi модуль #define WIFI_SERIAL Serial1 void setup() { // открываем последовательный порт для мониторинга действий в программе // и передаём скорость 9600 бод Serial.begin(9600); while (!Serial) { // ждём, пока не откроется монитор последовательного порта // для того, чтобы отследить все события в программе } Serial.print("Serial init OK\r\n"); // открываем Serial-соединение с Wi-Fi модулем на скорости 115200 бод WIFI_SERIAL.begin(115200); } void loop() { // если приходят данные из Wi-Fi модуля - отправим их в порт компьютера if (WIFI_SERIAL.available()) { Serial.write(WIFI_SERIAL.read()); } // если приходят данные из компьютера - отправим их в Wi-Fi модуль if (Serial.available()) { WIFI_SERIAL.write(Serial.read()); } }
SoftwareSerial
Некоторые платы Arduino, например Uno, прошиваются через пины 0 и 1 . Это означает невозможность использовать одновременно прошивку/отладку по USB и общение с Wi-Fi модулем. Решение проблемы — программный UART . Подключите пины TX и RX ESP-модуля к другим контактам управляющей платы и используйте библиотеку SoftwareSerial.
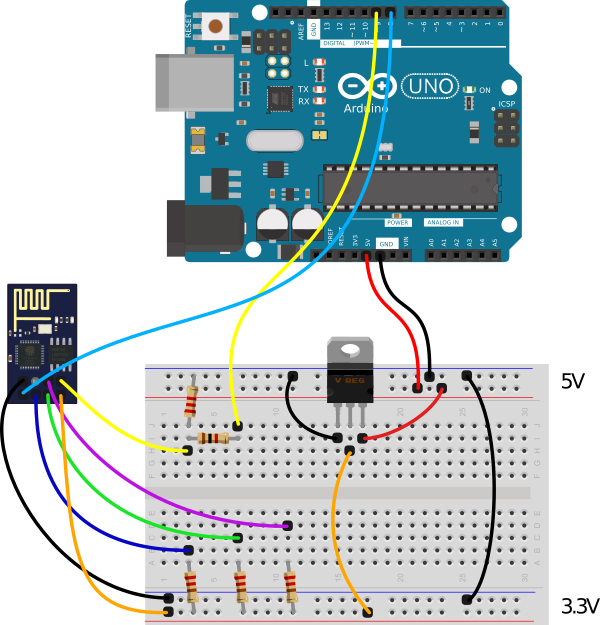
Для примера подключим управляющие пины Wi-Fi модуля TX и RX — на 8 и 9 контакты управляющей платы. Прошейте управляющую платформу кодом ниже.
Код прошивки
// библиотека для работы программного Serial #include // создаём объект для работы с программным Serial // и передаём ему пины TX и RX SoftwareSerial mySerial(8, 9); // serial-порт к которому подключён Wi-Fi модуль #define WIFI_SERIAL mySerial void setup() { // открываем последовательный порт для мониторинга действий в программе // и передаём скорость 9600 бод Serial.begin(9600); while (!Serial) { // ждём, пока не откроется монитор последовательного порта // для того, чтобы отследить все события в программе } Serial.print("Serial init OK\r\n"); // открываем Serial-соединение с Wi-Fi модулем на скорости 115200 бод WIFI_SERIAL.begin(115200); } void loop() { // если приходят данные из Wi-Fi модуля - отправим их в порт компьютера if (WIFI_SERIAL.available()) { Serial.write(WIFI_SERIAL.read()); } // если приходят данные из компьютера - отправим их в Wi-Fi модуль if (Serial.available()) { WIFI_SERIAL.write(Serial.read()); } }
HardwareSerial Mega
На платах форм-фактора Arduino Mega 2560 аппаратный UART, который отвечает за передачу данных через пины 1 и 0 , отвечает также за передачу по USB. Это означает невозможность использовать одновременно UART для коммуникации с Wi-Fi модулем и отладки по USB.
Но на платах такого форм-фактора есть ещё дополнительно три аппаратных UART:
Serial1: пины 19(RX1) и 18(TX1) ;
Serial2: пины 17(RX2) и 16(TX2) ;
Serial3: пины 15(RX3) и 14(TX3) .Список поддерживаемых плат:
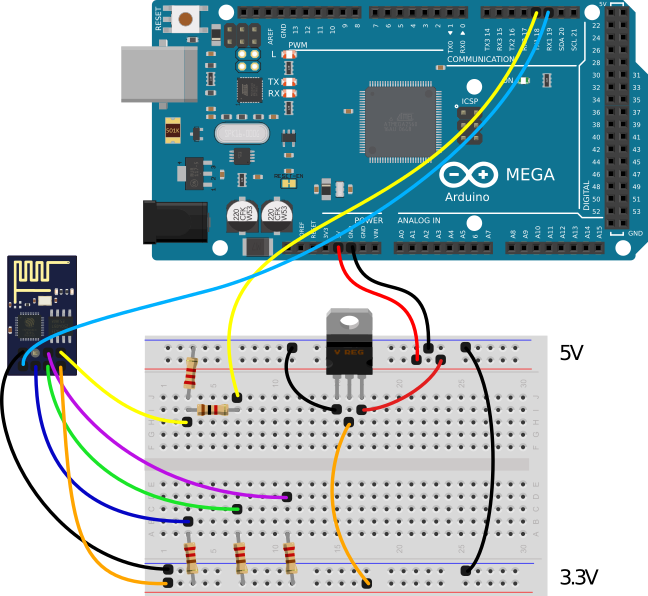
Подключите Wi-Fi модуль к объекту Serial1 на пины 18 и 19 на примере платы Mega 2560 Прошейте управляющую платформу кодом ниже.
Код прошивки
// serial-порт к которому подключён Wi-Fi модуль #define WIFI_SERIAL Serial1 void setup() { // открываем последовательный порт для мониторинга действий в программе // и передаём скорость 9600 бод Serial.begin(9600); while (!Serial) { // ждём, пока не откроется монитор последовательного порта // для того, чтобы отследить все события в программе } Serial.print("Serial init OK\r\n"); // открываем Serial-соединение с Wi-Fi модулем на скорости 115200 бод WIFI_SERIAL.begin(115200); } void loop() { // если приходят данные из Wi-Fi модуля - отправим их в порт компьютера if (WIFI_SERIAL.available()) { Serial.write(WIFI_SERIAL.read()); } // если приходят данные из компьютера - отправим их в Wi-Fi модуль if (Serial.available()) { WIFI_SERIAL.write(Serial.read()); } }
Примеры работы
Рассмотрим несколько примеров по работе с «AT-командами»
Тестовая команда «AT»
Откройте монитор порта. Настройте скорость соединения — 9600 бод. Конец строки — NL & CR . Введите команду AT и нажмите «Отправить». Это — базовая команда для проверки работы Wi-Fi модуля.
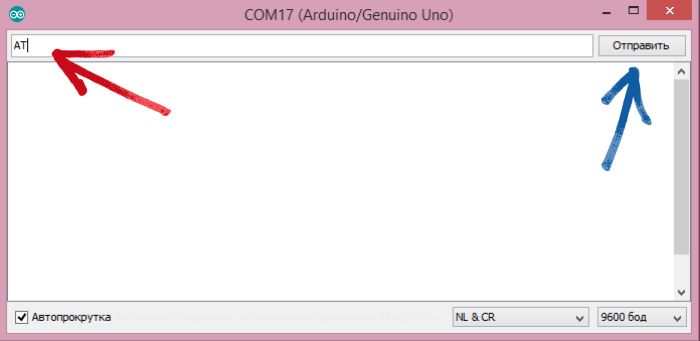 В ответ получим «OK»:
В ответ получим «OK»:  Если ответа нет или появляются непонятные символы — проверьте правильность подключения и настройки скорости обмена данными.
Если ответа нет или появляются непонятные символы — проверьте правильность подключения и настройки скорости обмена данными.Настройка режима работы
Wi-Fi модуль умеет работать в трёх режимах: